
La cobertura de nubes, la duración de las baterías y los ataques de águilas, todo forma parte del sobrevuelo de los drones.
Charles George, de UK CEH, informa sobre su campaña de campo en enero–febrero de 2020, permaneciendo 6 semanas en los páramos de gran altitud de Boyacá, Colombia, capturando imágenes con drones. PARAGUAS está investigando cómo las plantas y las personas están influyendo en el almacenamiento de agua en los páramos, la fuente de agua para muchas personas en Colombia.
El 6 de enero viajé con mi colega de UK CEH Chris Barry a Boyacá, Colombia, para llevar a cabo seis semanas de intenso trabajo de campo utilizando un dron para capturar imágenes de alta definición de las 12 microcuencas del proyecto. Microcuencas son pequeñas cuencas hidrográficas situadas en nuestra área de estudio de PARAGUAS: el páramo Guantiva–La Rusia. Estas microcuencas habían sido seleccionadas en una campaña de campo de febrero-marzo de 2019. A nuestra llegada a Tunja (Boyacá), nos acompañaron Jeffrey Prieto Naranjo y un conductor en una camioneta 4x4 para formar un pequeño pero efectivo equipo de trabajo de cuatro personas.
Durante este viaje Chris y Jeffrey, nuestro técnico de campo local, se dedicaron principalmente a cavar hoyos en la tierra y a tomar muestras de suelo a lo largo y ancho de las microcuencas, mientras que yo me centré en el vuelo del dron. Jeffrey, además de ser nuestro traductor, también desempeñó un papel fundamental en la obtención del acceso y los permisos para volar el dron y cavar en busca de muestras de suelo en los sitios. Como complemento, Jeffrey y Chris también recogieron un primer conjunto de muestras de agua. Al principio del proyecto descubrieron que ambos estaban interesados en el impacto del uso del suelo en la calidad del agua y acordaron colaborar en este tema supervisando conjuntamente a un estudiante apoyado a través de una beca de campo de PARAGUAS.
Las 12 microcuencas están organizadas en pares cercanos: una representa una cuenca poco intervenida, la otra una cuenca impactada. La campaña de vuelos con dron proporcionó imágenes de alta definición para generar valiosos modelos digitales de superficie (MDS) que son utilizados en modelos hidrológicos, para estimar el número de plantas, tipos y biomasa, y para permitir la comparación directa de las cuencas en términos de su principal composición de cobertura vegetal. Las muestras de suelo se recogieron para su análisis en los laboratorios de la Universidad de Tunja, lo que proporcionó datos sobre, por ejemplo, el contenido orgánico del suelo, la porosidad del suelo y la densidad aparente para informar el modelado del suelo.
La campaña de drones proporcionará tres recursos de datos principales
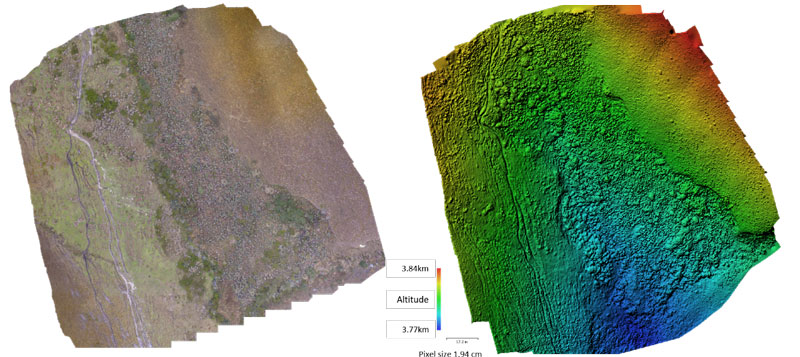
Para mí, esta campaña de drones fue el comienzo de mi trabajo. El dron recogió fotografías aéreas individuales con una resolución espacial muy alta (3 cm) que, ahora que estoy de vuelta en el laboratorio, estoy uniendo en un único MDS georreferenciado de toda la microcuenca. Este MDS es crucial para que el equipo de hidrólogos comprendan y modelen correctamente los flujos de agua superficial a través de cada cuenca.
También estoy generando una imagen ortomosaico de toda la cuenca a partir de las imágenes individuales de los drones que usaré para clasificar y mapear las principales clases de vegetación.

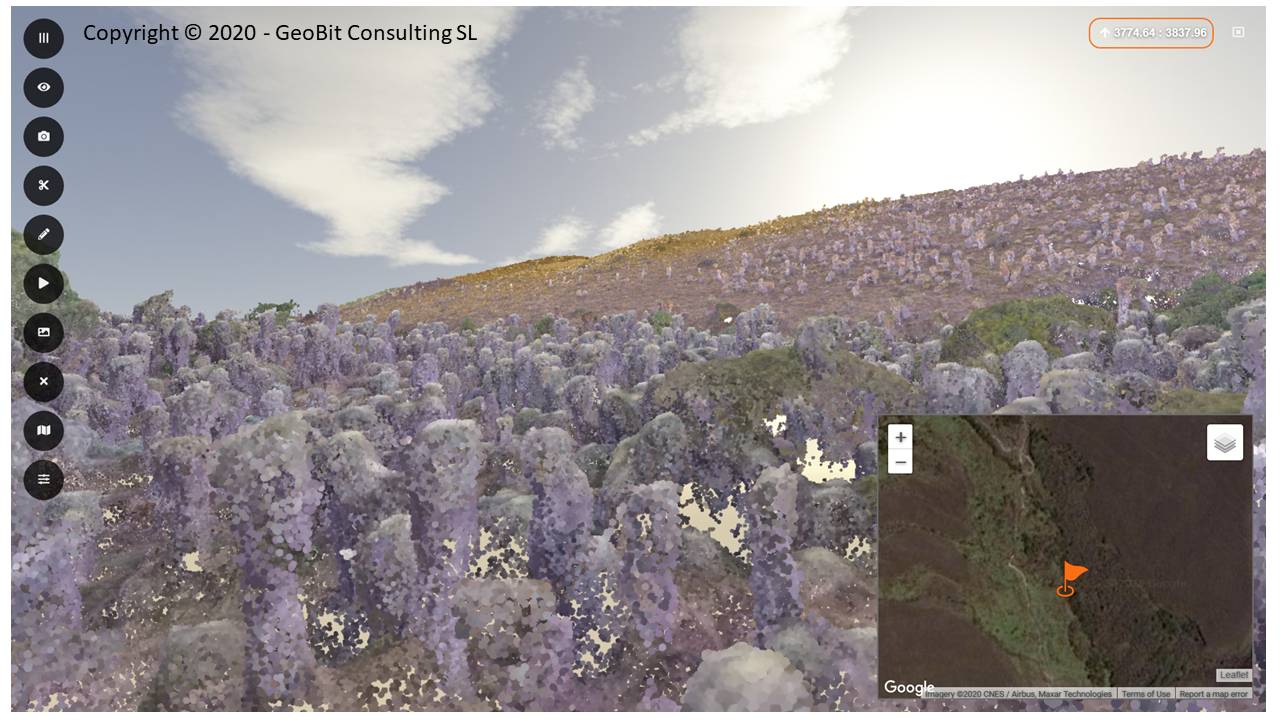
El asombroso detalle capturado por las imágenes del dron. Las formas de rosetas que son visibles en las imágenes son frailejones.
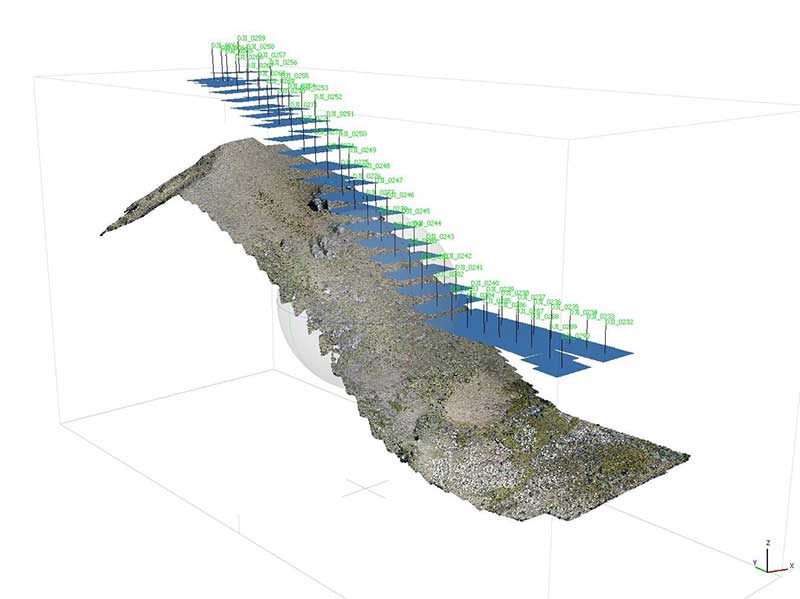
Finalmente, estoy generando nubes de puntos tridimensionales de la vegetación dentro de cada microcuenca. El plan es relacionar más adelante en el proyecto estos datos, especialmente los datos de altura de las plantas, con las observaciones alométricas y de biomasa recogidas por el equipo botánico para producir mapas de biomasa de los principales tipos de plantas que se encuentran dentro de las microcuencas. En este momento France Gerard (experta en el Proyecto PI y en teledetección) y yo estamos colaborando con Ce Zhang, experto en Inteligencia Artificial (IA) y profesor de la Universidad de Lancaster, para desarrollar un enfoque de IA que mapeará las plantas individuales a partir de los ortomosaicos derivados de los drones y las nubes de puntos.
A su vez, todos estos datos derivados proporcionarán información valiosa para ayudar a evaluar la relación entre la vegetación, el suelo y la hidrología de nuestros sitios y eventualmente a través de todo el páramo de Guantiva-La Rusia.
En el campo
Como nuestros sitios de estudio están a una altura de 3.500 a 4.000 m, Chris y yo nos vimos obligados a pasar tiempo en Tunja (3.000 m) durante los tres primeros días de nuestro viaje para aclimatarnos a la altitud. Esto me dio un tiempo valioso para planificar y programar las rutas de vuelo del dron para las 12 cuencas que íbamos a visitar en las próximas semanas.
Una vez en el campo, nuestros días seguían la misma rutina: el día normalmente empezaba a las 6 de la mañana, llegar a las cuencas desde nuestro alojamiento a menudo implicaba una hora y media de viaje seguido, además de una hora de caminata por el páramo, así que los días largos eran inevitables. Una vez en el lugar, estábamos a merced del clima y las nubes. No era inusual llegar a un sitio y tener que permanecer durante horas en las nubes de niebla, con frío y humedad, esperando a que el sol irrumpiera. ¡La espera récord en este viaje fue de cinco horas! Las nubes bajas o la niebla no sólo hacen imposible recoger imágenes decentes, ¡cualquier entrada de agua en el dron podría causar un mal funcionamiento!
¡Una vez en el lugar estaba a merced del clima y las nubes!
Mi objetivo original era permanecer tres días para inspeccionar por completo cada microcuenca (cubriendo en promedio un área de 1 km2, siendo la mayor de 6 km2). Sin embargo, en promedio me tomó 2 días por cuenca, un resultado bienvenido ya que la cuenca más problemática nos tomó 5 días para hacer el estudio debido a los fuertes vientos y el extraño halcón y águila que atacaron al dron. En total piloté 151 vuelos que sumaron un tiempo total de vuelo de aproximadamente 45 horas, produciendo más de 20.000 imágenes y 350gb de datos.


Ahora estoy de vuelta en el Reino Unido ocupado en el procesamiento de las imágenes, lo que calculo que llevará unas 10 semanas de tiempo de procesamiento.
Para unir todas las imágenes estoy usando un software de "Estructura de movimiento (SfM)", (en este caso de Agisoft). Después del pre-procesamiento inicial de los datos, me llevará aproximadamente tres meses clasificar las imágenes del dron para mapear los principales tipos de vegetación en las cuencas. El trabajo basado en Inteligencia Artificial es mucho más experimental y es probable que lleve más tiempo.
Más sobre la tecnología de los drones
Para esta campaña volé con un DJI Mavic 2 Pro (un pequeño dron multirotor de 4 hélices),equipado con una cámara Hasselblad de 20 megapíxeles con un sensor CMOS de 1 pulgada para proporcionar excelentes capturas detalladas.
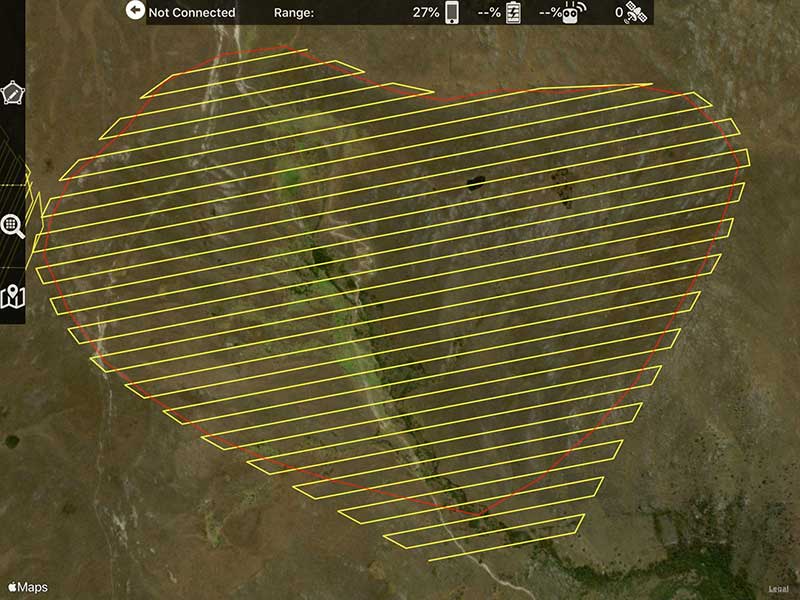
El dron funciona en conjunto con el software de control de vuelo Map Pilot (Drones Made Easy) instalado en un iPad que contiene los planes de vuelo y un modelo digital de elevación aproximado. Este último permite que el dron vuele a una altura constante sobre el suelo para dar un tamaño de píxel uniforme en toda el área (y para evitar que el dron vuele hacia la montaña). El software de control de vuelo determina las líneas de vuelo (a través de una cuadrícula basada en el límite de vuelo que define el área de estudio - ver imagen abajo), la altura de vuelo y la velocidad se basaron en la cantidad de detalle espacial y la cantidad de superposición entre las imágenes individuales (superposición frontal -80%) y entre cada línea de vuelo (superposición lateral - 80%) que quería lograr. El grado de superposición determina el grado de detalle tridimensional.
Este plan de vuelo, incluyendo la velocidad y la altura que se cargaron al dron, una vez lanzado, llevará a cabo la campaña de forma autónoma. Durante esta campaña yo estaba volando el dron a 120m sobre el terreno. Como piloto del dron, mi papel es lanzar y aterrizar el dron de forma segura e intervenir cuando se detecten peligros, tales como demasiado viento, nubes o aves de rapiña.
La duración de la bateria fue la parte más crítica de la campaña. Una batería promedio permite aproximadamente 20 minutos de tiempo de misión dependiendo de la velocidad del viento y los cambios de altitud, y yo solo tuve acceso a ocho baterías en el campo. En total, 160 minutos de vuelo cubrirían en promedio alrededor de 1 km2 de área. Llevar las baterías desde el Reino Unido a Colombia no fue sencillo debido a las regulaciones de las aerolíneas sobre estos asuntos y, al final, para no hacer una larga historia, varios miembros del equipo de PARAGUAS transportaron las baterías en su equipaje de mano para ayudarme.
Charles George
Científico de observación de la tierra